Electronics & Communication Gate Yearwise
Electronics and Communication Gate 2024 Questions with Answer
Ques 1 GATE 2024
A digital communication system transmits through a noiseless bandlimited channel [-W, W]. The received signal z(t) at the output of the receiving filter is given by z(t) = Σn b[n] x(t − nT) where b[n] are the symbols and x(t) is the overall system response to a single symbol. The received signal is sampled at t = mT. The Fourier transform of x(t) is X(f). The Nyquist condition that X(f) must satisfy for zero intersymbol interference at the receiver is
Ques 2 GATE 2024
A white Gaussian noise w(t) with zero mean and power spectral density N0/2 when applied to a first-order RC low pass filter produces an output n(t). At a particular time t = tk the variance of the random variable n(tk) is
Ques 3 GATE 2024
An amplitude modulator has output (in Volts)
s(t) = A cos(400πt) + B cos(360πt) + B cos(440πt).
The carrier power normalized to 1Ω resistance is 50 Watts.
The ratio of the total sideband power to the total power is 1/9.
The value of B (in Volts, rounded off to two decimal places) is
Ques 4 GATE 2024
A source transmits a symbol s, taken from {−4, 0, 4} with equal probability, over an additive white Gaussian noise channel. The received noisy symbol r is given by r = s + w where the noise w is zero mean with variance 4 and is independent of s. Using Q(x) = (1 / √(2π)) ∫x∞ e−t2/2 dt, the optimum symbol error probability is
Ques 5 GATE 2024
The information bit sequence {111010101} is to be transmitted by encoding with Cyclic Redundancy Check 4 (CRC-4) code, for which the generator polynomial is C(x) = x4 + x + 1.
The encoded sequence of bits is
Ques 6 GATE 2024
Let X(t) = A cos(2πf0t + θ) be a random process, where amplitude A and phase θ are independent of each other, and are uniformly distributed in the intervals [-2, 2] and [0, 2π], respectively.
X(t) is fed to an 8-bit uniform mid-rise type quantizer.
Given that the autocorrelation of X(t) is $R_x(τ) = \frac{2}{3} cos(2πf_0 τ)$, the signal to quantization noise ratio (in dB, rounded off to two decimal places) at the output of the quantizer is
Ques 7 GATE 2024
A machine has a 32-bit architecture with 1-word long instructions.
It has 24 registers and supports an instruction set of size 40. Each instruction has five distinct fields, namely opcode, two source register identifiers, one destination register identifier, and an immediate value.
Assuming that the immediate operand is an unsigned integer, its maximum value is
Ques 8 GATE 2024
In the context of Bode magnitude plots, 40 dB/decade is the same as
The correct answer is Option A: 12 dB/octave.
The key here is knowing the relationship between a decade and an octave. A decade means a 10x change in frequency, while an octave means a 2x change.
So 1 decade = log2(10) ≈ 3.32 octaves.
To convert 40 dB/decade to dB/octave:
40 ÷ 3.32 ≈ 12 dB/octave
As a quick rule to remember — 20 dB/decade = 6 dB/octave, so 40 dB/decade = 12 dB/octave. Simply double it.
Ques 9 GATE 2024
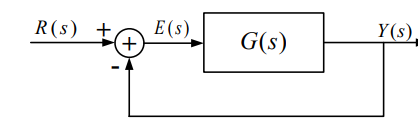
In the feedback control system shown in the figure below G(s) = 6 / [s(s + 1)(s + 2)] R(s), Y(s), and E(s) are the Laplace transforms of r(t), y(t), and e(t), respectively. If the input r(t) is a unit step function, then
Ques 10 GATE 2024
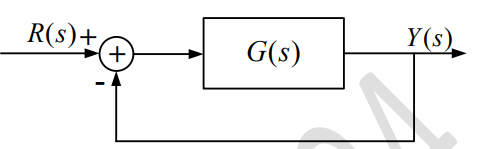
Consider a unity negative feedback control system with forward path gain $G(s)=\frac{K}{(s+1)(s+2)(s+3)}$ as shown.
Ques 11 GATE 2024
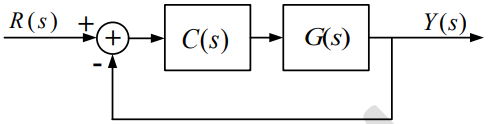
A satellite attitude control system, as shown below, has a plant with transfer function $G(s)=\frac{1}{s^2}$ cascaded with a compensator $C(s)=\frac{K(s+α)}{s+4}$ where K and α are positive real constants.
Ques 12 GATE 2024
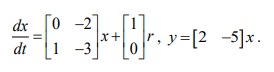
Consider a system S represented in state space as
Ques 13 GATE 2024
For the Boolean function F(A,B,C,D) = Σ m(0,2,5,7,8,10,12,13,14,15) the essential prime implicants are
Total Unique Visitors