EC > GATE 2024 > Stability Analysis
A satellite attitude control system, as shown below, has a plant with transfer function $G(s)=\frac{1}{s^2}$ cascaded with a compensator $C(s)=\frac{K(s+α)}{s+4}$ where K and α are positive real constants.
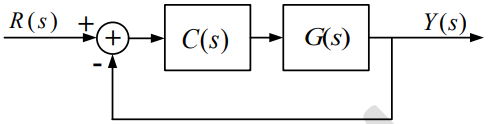 In order for the closed-loop system to have poles at $-1±j√3$, the value of α must be
In order for the closed-loop system to have poles at $-1±j√3$, the value of α must be
Correct : D
Similar Questions
Consider an even polynomial p(s) given byp(s) = s4 + 5s2 + 4 + K,where K is an unknown real parameter. The complete range of K for which p(s) has all its roots...
The loop transfer function of a negative feedback system is
The value of K, for which the system is marginally stable, is
The Nyquist stability criterion and the Routh criterion both are powerful analysis tools for determining the stability of feedback controllers. Identify which o...
Total Unique Visitors
Loading......