EC > GATE 2022 > Control System Analysis
The block diagram of a closed-loop control system is shown in the figure. R(s), Y(s), and D(s) are the Laplace transforms of the time-domain signals r(t), y(t), and d(t), respectively. Let the error signal be defined as e(t) = r(t) − y(t). Assuming the reference input r(t) = 0 for all t, the steady-state error e(∞), due to a unit step disturbance d(t), is _________ (rounded off to two decimal places).
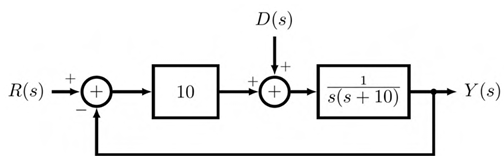
Correct : 0.10
Similar Questions
The position control of a DC servo-motor is given in the figure. The values of the parameters are KT=1 N-m/A, Ra=1Ω, La=0.1H, J=5kg-m2, B=1 N-m/(rad/sec)...
Mr. X speaks _________ Japanese _________ Chinese.
A sum of money is to be distributed among P, Q, R, and S in the
proportion 5 : 2 : 4 : 3, respectively.
If R gets ₹ 1000 more than S, what is the share of Q (...
Total Unique Visitors
Loading......